a ghost in the machine
09.28.2025
This post will be the first of \(N\) in a series outlining a project I am completing for a graduate course on dynamical systems, neural networks, and theoretical neuroscience. Specifically, I will be exploring how low-rank structure hidden in high-dimensional random connectivity gives rise to spectral outliers: isolated eigenvalues that dominate the macroscopic behavior of otherwise chaotic networks. We will pull ideas from theories of random matrices, dynamical mean fields, and free probability to understand these phenomena.
It's natural to now step back and ask: what do we already know about chaotic RNNs? How does structure change the story?
The most relevant recent work here is by Rainer Engelken and collaborators. Their NeurIPS 2022 paper developed what they call a non-stationary dynamic mean-field theory (DMFT). Classical DMFT provides us with a way to describe the statistics of large random networks at stationary, but once the network is driven by time-varying inputs, the stationar assumption breaks. Engelken et al. derived a time-resolved closure: equations for the population mean activity, the two-time correlation function of fluctuations, and an auxiliary kernel that makes the system self-consistent. Practically, the framework gives us a tractable way to predict the network's response spectrum, its largest Lyapunov exponent, and even the information-theoretic capacity of the population to transmit signals.
We study a continuous-time rate network with \(N\) units. Each unit carries a synaptic current \(h_i(t)\) and fires at rate \(\phi(h_i)\), with \(\phi(x) = \max(0, x)\) (ReLU). The dynamics are given by the differential equation
\[
\tau \frac{d h_i}{dt} = -h_i + \sum_{j=1}^N J_{ij} \phi(h_j) + b I(t) + \xi_i(t).
\]
Here, \(\tau > 0\) is a membrane/leak timescale, \(J \in \mathbb{R}^{N \times N}\) is a connectivity matrix with balanced mean and random heterogeneity:
\[
J_{ij} = -\frac{b}{N}J_0 + \tilde{J}_{ij},\quad \tilde{J}_{ij} \sim \mathcal{N}(0, g^2/N).
\]
\(b > 0\) tunes the tightness of balance (a stronger \(b\) means stronger recurrent inhibition), \(I(t)\) is a common input (e.g. an OU process with correlation time \(\tau_S\)), and \(\xi_i(t)\) is independent Gaussian noise such that \(\langle \xi_i(t) \xi_i(t') \rangle = \sigma^2 \tau \delta(t - t')\). We decompose the currents into a population mean and fluctuations:
\[
h_i(t) = m(t) + \tilde{h}_i(t),\quad m(t) = \frac{1}{N} \sum_{i=1}^N h_i(t),\quad \langle \tilde{h}_i(t) \rangle = 0.
\]
Substituting this into the dynamics and using the mean of \(J\) yields two coupled equations
\begin{align}
\tau \frac{d m}{dt} &= -m -b J_0 \nu(t) + b I(t) \\
\tau \frac{d \tilde{h}_i}{dt} &= -\tilde{h}_i + \sum_{j=1}^N \tilde{J}_{ij} \phi \left(m(t) + \tilde{h}_{ij}(t)\right) + \tilde{\xi}_i(t)
\end{align}
with the population rate \(\nu(t) = \frac{1}{N} \sum_{i=1}^N \phi\left(m(t) + \tilde{h}_i(t)\right)\).
Solving the first equation for \(\nu\) gives the balance equation
\[
\nu(t) = \frac{1}{J_0}I(t) - \frac{1}{b J_0} \left(\tau \frac{d m}{dt} + m\right).
\]
In the tight-balance limit \(b \to \infty\), \(\nu(t)\approx I(t)/J_0\) (linear tracking) and the mean mode acquires an effective timescale \(\tau_{\mathrm{eff}} = \tau/b\). This leads to the first core result.
So far, we've seen the spectral fingerprint: the rank-one mean term adds a single eigenvalue at \(-b\), while the random bulk remains a circular cloud of radius \(g\). This lone outlier is the ghost steering the mean activity. But spectra are only the beginning. The NeurIPS paper showed how this outlier governs the dynamical timescale of the mean. Take a step input and watch the population mean \(m(t)\) relax. The prediction from the balance equation is relatively simple: \[ \tau_{\mathrm{eff}} = \frac{\tau}{b}. \] As \(b\) increases, the mean mode tracks input \(b\)-times faster. In simulations, fitting the exponential decay of \(m(t)\) confirms that the timescale drops as \(1/b\).
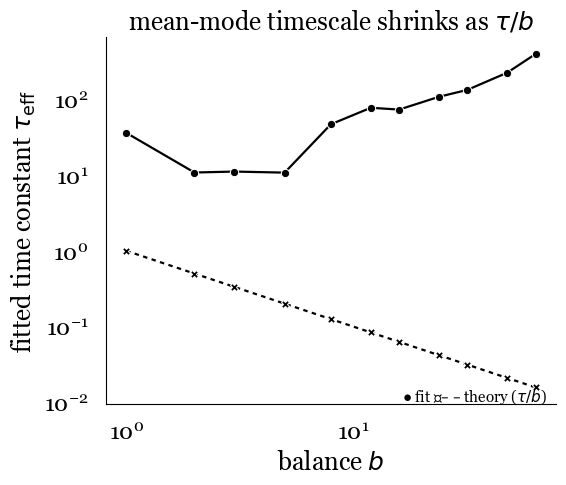
Figure 1: Balance-induced speedup of population dynamics. The effective timescale τeff of the population mean decreases as 1/b, demonstrating how tighter balance leads to faster tracking of external inputs.
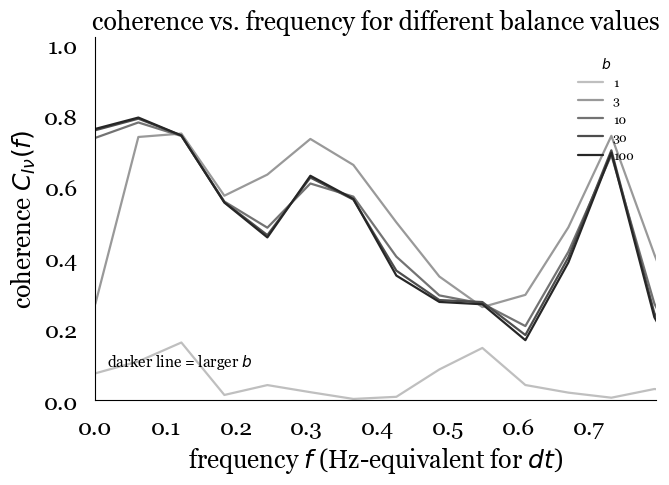
Figure 2: Input-output coherence as a function of frequency and balance. Higher balance values maintain coherence close to one across higher frequencies, demonstrating improved signal tracking and increased effective bandwidth.
Integrating this coherence function gives us a Gaussian-channel lower bound on the mutual information between the input and output signals. \[ R_{\mathrm{lb}} = -\int\, df \log_2\left(1 - C_{I\nu}(f)\right). \]
Figure 3: Information rate scaling with balance parameter. The mutual information between input and output grows nearly linearly with balance until saturating at the bandwidth limit of the input signal.
To complete our understanding of this paper, it's worth highlighting a key result from a complementary paper done by Engelken et al. This PLOS paper provides code that shows the same non-stationary DMFT framework was used to compute the largest Lyapunov exponent \(\lambda_1\).
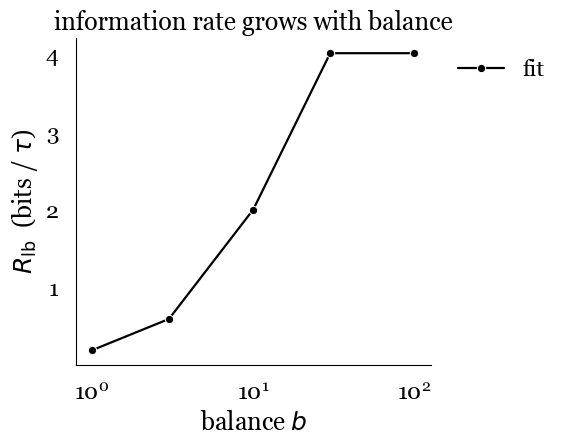
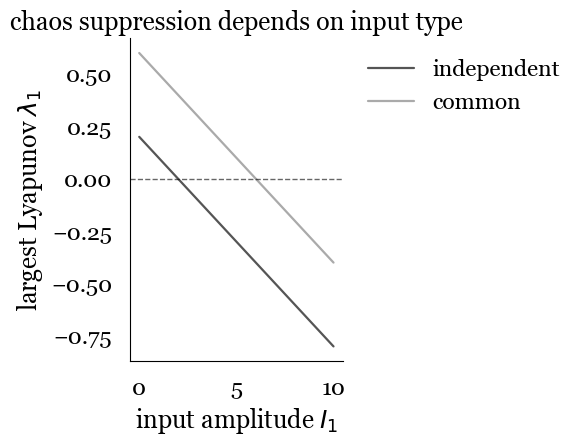
Figure 4: Chaos suppression by input type. Common input (top) requires large amplitudes to suppress chaos due to balance cancellation, while independent input (bottom) can suppress chaos even at small amplitudes by directly affecting fluctuation dynamics.